
Hi, my name is Siyul and over the course of a year I competed in VEX Robotics (77174Y / 77174A). VEX has been one of the most challenging experiences of my academic career. VEX Robotics is an international engineering competition in which teams design, construct, and program autonomous and driver controlled robots to complete a unique game challenge each season. Success of a team requires strategic thinking, CADing skills and collaboration.
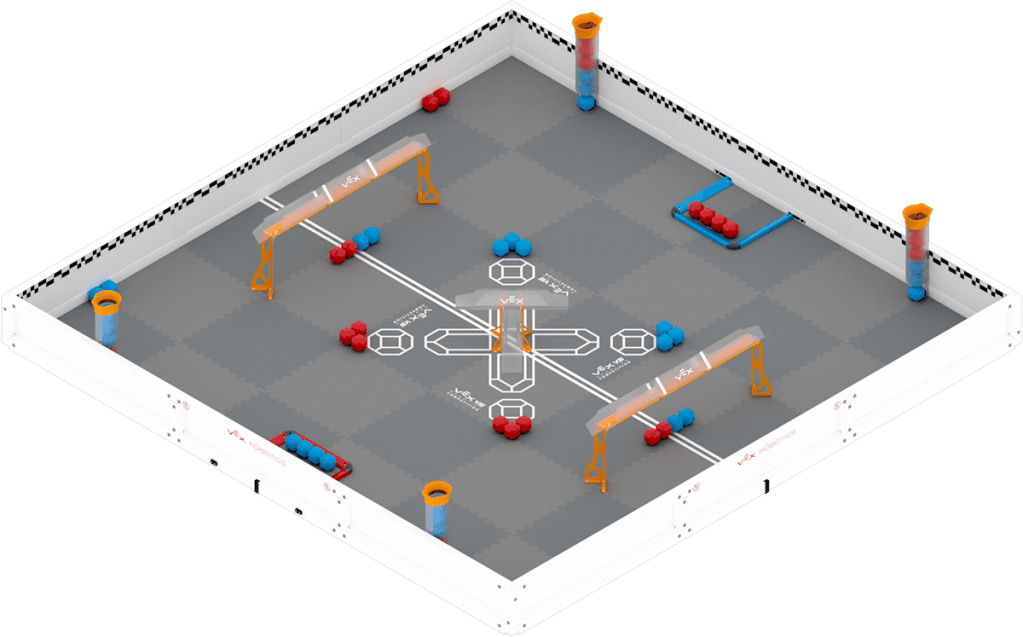
Figure 1. Vex Pushback Field
An important aspect of VEX is the Engineering Design Process. The development of a robot involves identifying constraints, researching solutions, constructing prototypes, conducting testing, analyzing performance, and continuously refining designs. Rarely does an initial concept function as intended. Instead, engineering is an iterative process driven by experimentation, and failure.
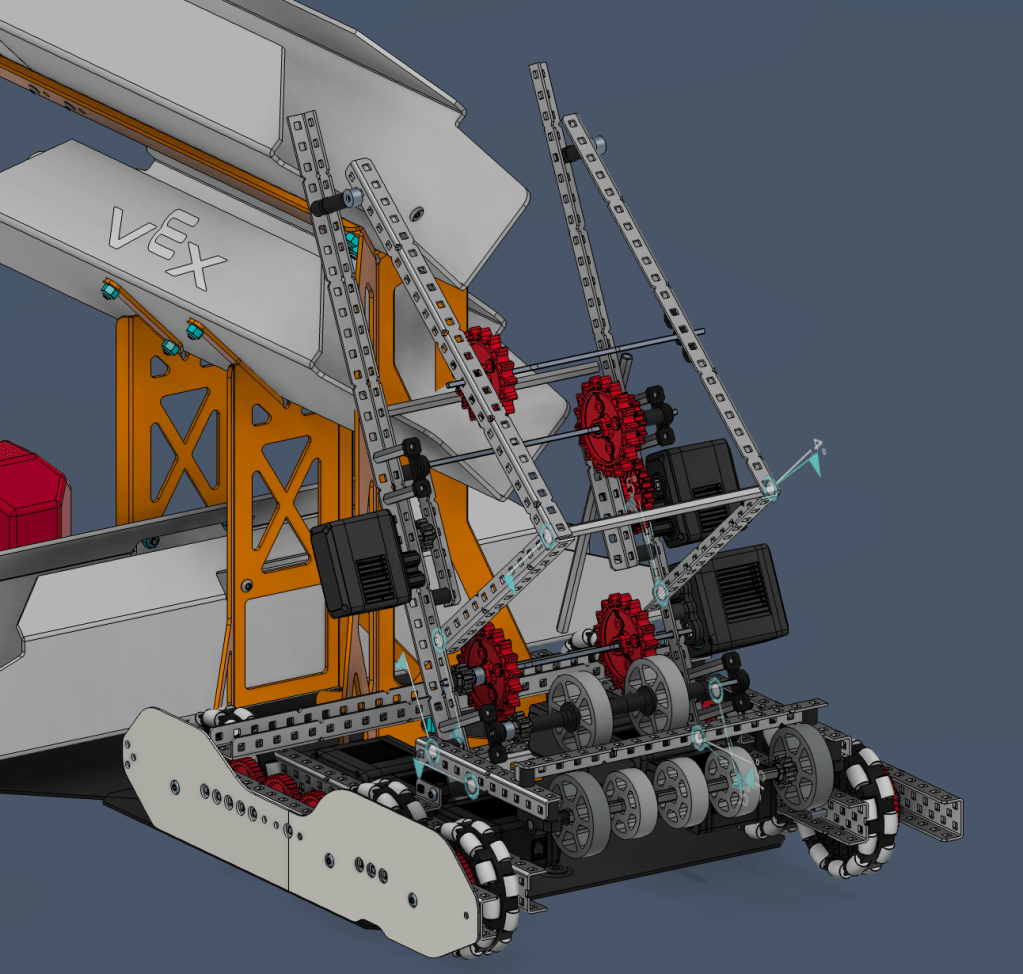
Figure 2. Provincials Bot CAD
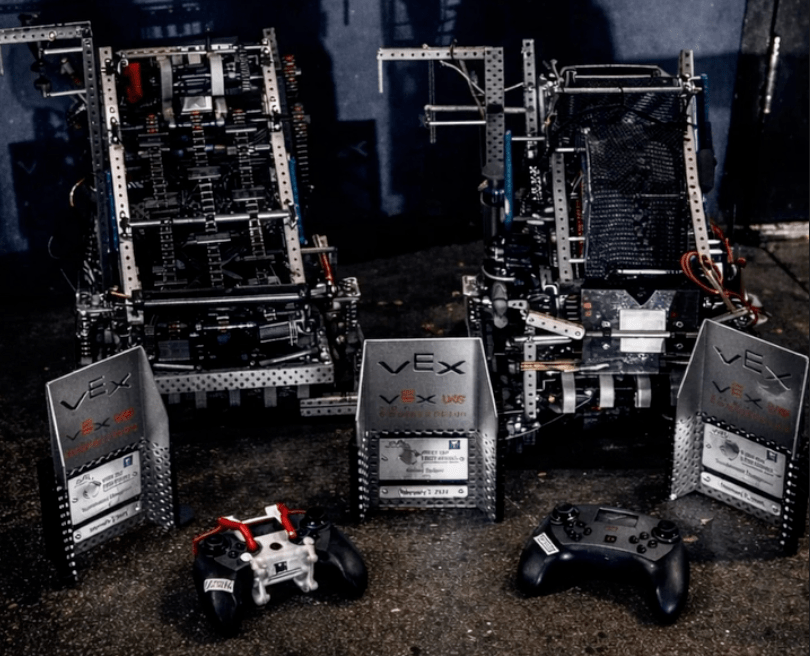
Figure 3. Local Comp TC
Programming is a fundamental aspect of robotics. C++, a commonly used language for coding Vex robots, requires knowledge of PID; a closed-loop feedback system that continuously minimizes error by calculating proportional, integral, and derivative responses to changing conditions. Coding also further dives into mechanisms such as odometry, a localization technique that estimates a robot’s position through the integration of encoder and inertial sensor measurements. Another common technique being Monte Carlo Localization (MCL), a probabilistic algorithm used in advanced autonomous systems. Rather than assuming a single position estimate, MCL represents the robot’s location as a distribution of particles, each corresponding to a possible state. Through repeated cycles of prediction, sensor-based weighting, and resampling, the algorithm predicts the most probable position while accounting for uncertainty.
As this being my first year, I experienced a lot of setbacks and failures further helping me learn about and develop my skills for next season. One of this season’s highlights was competing in the Vex world championships against some of the best teams in the world and earning multiple awards throughout various tournaments.
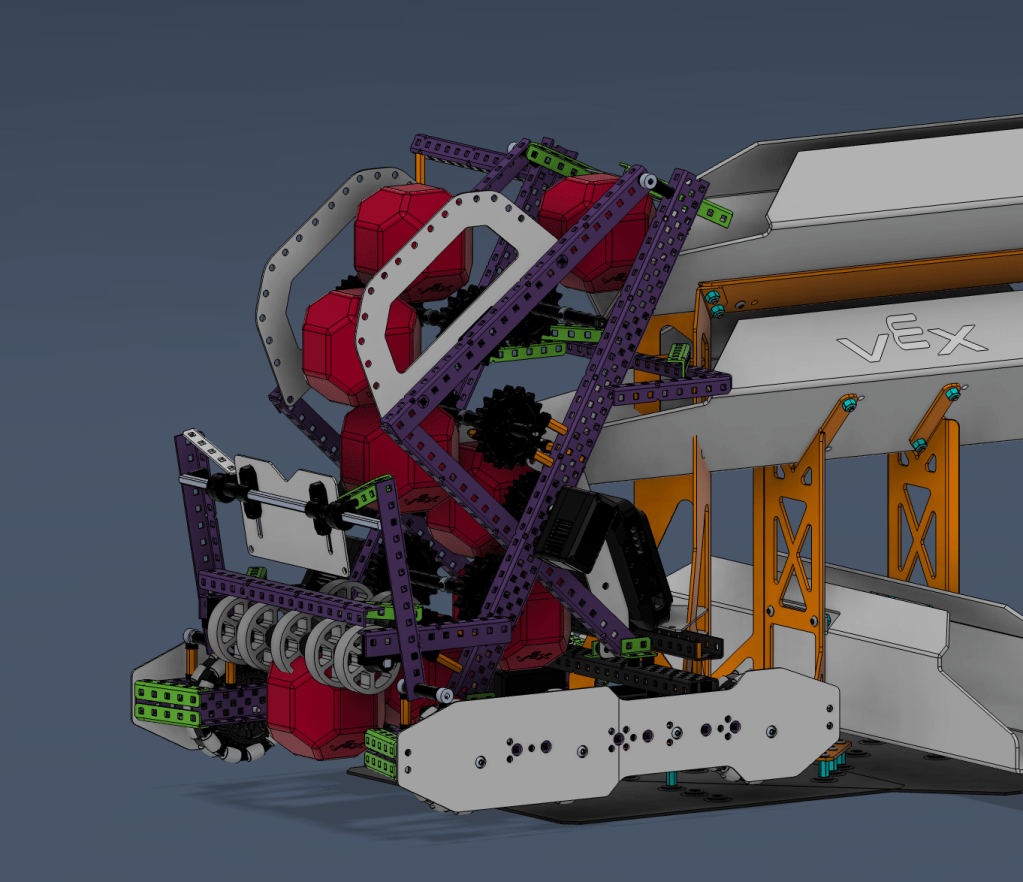
Figure 4. Push Back Worlds CAD
Figure 5. Push Back Worlds Bot
This season, I plan to build on the experience I gained last year by continuing to develop my skills in engineering design, CAD, programming, and problem-solving. I want to apply what I learned from past successes and failures to improve both my technical abilities and my approach to building more efficiently.
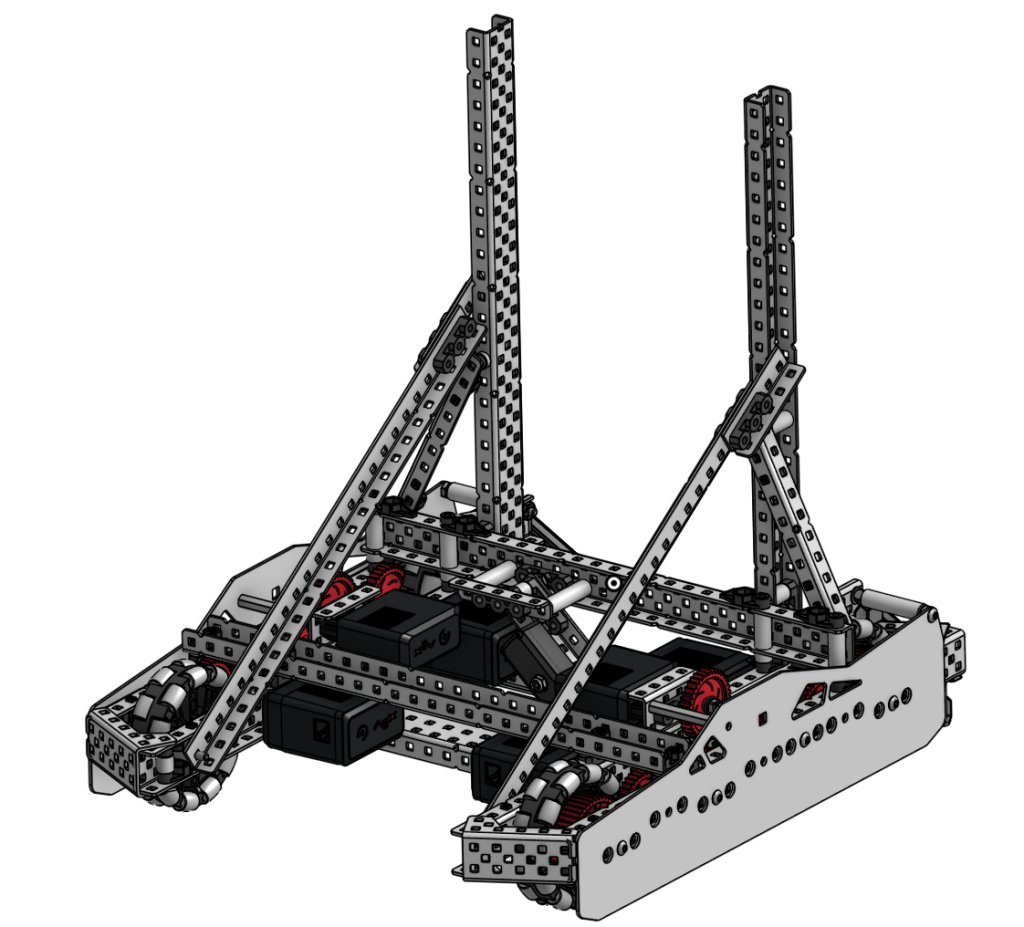
Figure 6. 2026-2027 Override Bot (Drivetrain)
