
We’re Thomas and Daniel, members of the Saints Robotics club. Last winter, we represented Saints to compete against Notre Dame Secondary School in a robotic tournament: the Balloon Battle. In this competition, we created specialized balloon-bearing robots, which we maneuvered to pop the opponents’ balloons while defending our own, almost like Mario Kart. The competition proved to be a very engaging, fun, and valuable experience, where we got to build specialized robots with VEX Robotics parts.
In this article, we’re going to talk about our process of designing, building, and competing with our balloon bots. The two of us were in separate teams and both would like to share slightly different takeaways from this process.
Thomas
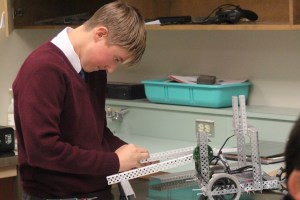
It all started with the design process, where we formed a design for our robot from the very depths of our minds. One of our groups developed a four-wheel robot, while the other started making an unconventional, but more maneuverable, three-wheeled robot.
I chose to build a tricycle robot to sacrifice balance for the ability to turn on a penny. One problem with this was that my robot was too heavy in the front and when the spike went down, my robot would fall forward. To counter this, I added two weights to the back that weighed down the robot in the back, distributing the weight and allowing it to pop balloons with its spike freely. Another problem I encountered was the wheels were coming off in the middle of the battle. To stop this malfunction, I added a wheel guard and secured the wheels in place. Overall, the super long spike and ability to turn flawlessly eventually allowed me to win the balloon bots competition.

Daniel:
For the balloon battle competition, my teammates prioritized mobility and agility rather than using advanced methods of attack or special gadgets, allowing us to maneuver around Notre Dame’s VEX IQ robots. In the end, we ended up designing a robot that sported the traditional four wheel setup while incorporating omniwheels for maneuverability. We started with regular wheels, but we decided to test manueverability with a pair of omniwheels, eventually fully converting after we saw its crazy manueverability. The omniwheels grant much better mobility, and allows for quick escapes and defensive manuevers, a key strategy in the competition. Speed was also important, but with heavy metallic parts results in more inertia, and the stopping was not so smooth, though front mounted wheels and balance issues also contributed to this.
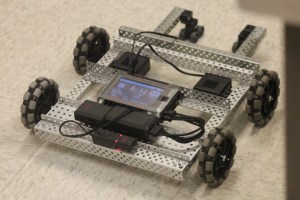
The arm we used was actually rather simplistic, it was a single bar with nails facing in all three axes, which really maximised moves like spins whilst still allowing for simpler attacks such as charging into opponents.
Looking into future competitions, I’d say movement is probably one of the biggest keys, but I think incorporating four-wheel driving or distributing the weight better would help a lot.

